

Diana7
アジャイルロボット7軸ロボットアーム、空中バーチャルウォール、関節ゼロフォースなど、いままでにない技術がたくさん搭載され、ロボットアームが人間との協働がより一層簡単になりました。
高知能ロボットオペレーティングシステム
AgileRobots社が独自に開発したロボット脳をリンクするロボットOS(アジャイルコアOS、演算能力により、AIロボットの脳とOSは継続的に学習、反復、アップグレードを行い、ソフトウェアとハードウェアが融合したエコシステムを形成します。ロボット・ブレインとOSは、オートメーション・システムの構成方法を再定義し、ユーザー・フレンドリーな構成インターフェースと力制御および視覚制御インターフェースを統合しています。様々なハードウェアおよびソフトウェア機器を同時に接続し、数時間で新しいタスクの編集と構築を可能にし、機器の稼働率を大幅に高め、長いプロセス構築から無駄を省くことができます。
世界最先端のフォースコントロール&フォースセンシング技術
強力な自社開発AIアルゴリズムと自社開発の高分解能トルクセンサーにより、世界最高感度の衝突検知能力を実現。 AgileRobotsは、既存のロボット技術の限界を突破して知覚をさらに敏感にしました、ミリ秒単位の反応速度と強力な演算でナイフの先端が人体に触れる瞬間の絶対的な安全性を確保することに全力を注いで開発しました。
世界最高レベルのマシンビジョンアルゴリズム
協働ロボットは、ロボットが「世界を見る」ことを可能にする視覚認識で高い実績を上げています。 高精度なセンサーキャリブレーション、特徴抽出、マッチング、トラッキング、ディープラーニングによるターゲット検出、インスタンスセグメンテーションなどのキーテクノロジーを開発しました。 シンプルで信頼性の高い配置と並列加速のサポートにより、正確で安定した高速な物体定位、測定、空間的なポーズ分解能を実現します。 応用例としては、ビジョンガイドによるロボットの軌道生成、軌道修正、ビジョンサーボなど、未知で非構造的なシナリオでのロボットの運用ニーズに応えられるようなシナリオが挙げられます。 協働ロボットのビジョンテクノロジーは、3C家電産業、医療分野、農畜産業、軽工業など、多くのアプリケーションシナリオで実装されています。
自律的プランニングとロボット知能
AgileRobotsは、深層学習と強化学習をベースにした自社開発のAI知能アルゴリズムにより、ミリ秒単位の視覚認識速度を実現し、ロボットが自動的に経路を計画することを可能にしました。 ロボットブレインは、多数の未知のターゲットを素早く識別し、自動的に把持領域を認識することができるため、人間とロボットの共同作業をより便利に、効率的に、そして安全に行うことができます。
空中バーチャルウォール
ドイツ宇宙航空社が提供したIPで量産可能になったAgileRobots(アジャイルロボット)の7軸協働ロボット‐DIANA、空間認識した上で、自由自在にバーチャルウォールを設定できます。設定したエリア内のみで動作可能で協働ロボットの活用シーンが大幅に増えます。また、進入禁止のエリアも空中で設定でき、様々な現場で使えるようになります。
応用例
外科の手術
部分的な切除などをロボットに任せることができます、医師はもうロボットを監視する必要がありません、エリアを設定しておけば、エリア外の動作はしないので、大きく役に立ちます。
研磨作業
車体の研磨のエリアだけを指定して作業させることが可能。エリアを超える作業は実行されませんので安心して任せることが可能。
関節の力がゼロ
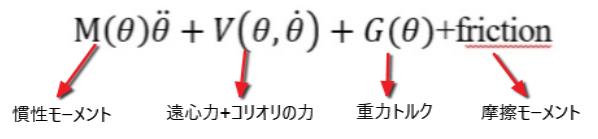
ロボットアームは動作時、上記の図のような力が発生するため、制御システムはロボットアームの関節角度と関節角速度をリアルタイムで取得をし、識別した結果、それに応じて力をリアルタイムでロボットに与え、上記の力をかき消す必要があります。AgileRobotsはこれを実現できました。
ビジュアルサーボ
AgileCore.OS
視覚情報処理過程と搭載されているAgileCoreの結合により、ビジュアルサーボの実現が出来ました、一体化したことでリアルタイムでのビジュアル解析で制御システムに安定的な環境を与えることができました。
動きやフォーメーション
アームの動きや各種フォーメーションや動作、AgileCoreにて正確且つ簡単に作成をし制御することが可能
力覚と触覚
Force sense
フレキシブルに力加減を自己コントロールをし、タスクを最後まで丁寧に実行する
Tactile
押し込みの力や感覚、人間の手に近い動作で作業可能
衝突検出
衝突の検出
DIANAは非常に小さな抵抗力をも検出可能です、検出後から停止までわずか数mS、人間の腕に近い感覚で作業するので、人間と同じ環境に働くことが可能になりました。ロボットと衝突することを気にすることなく、シンプルに一緒に作業をすることが可能
手先の感覚
ハンドを装着した場合でも、空間力覚に基づいて研究されたシステムで感知能力は変わらず、常に鋭い感覚をキープ

追随機能
1台のロボットと同じ動作軌跡をたどって作業することが可能。複数同一作業の同時進行が可能になりました。